TA7Drv har även en funktion för att skicka runt värden mellan ducar. Hastigheten för läsning och skrivning kan ställas in samt även accelereras när insignalen ändrar sig mer än inställd hysteres.
Justering av DTD innerhållet görs via en textfil TA7DTD.txt och den kan dels nås via denna dialogruta och dels ändras vi någon annan texeditor. Programmet undersöker en gång per minut om någon justerat i textfilen.
Kommunikationen med ducar mm sker via Channel och är alltså INTE begränsad till Talmeprotokollet.
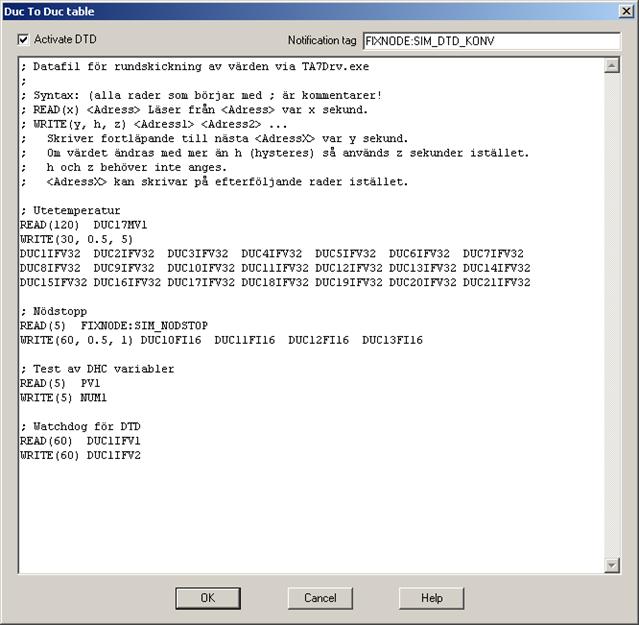
Här kan hela DTD funktionen aktiveras eller stängas av.
Vid ändring sätts "Notification tag" till 1, om konverteringen
av textfilen lyckas återställs punkten till 0.
Det garanteras att punkten hålls på en 1:a under minst en sekund. Detta kan
t.ex. användas för att sätta ett larm i SCADA systemet. Om larmet inte återgår
till 0 så är det alltså ett fel i textfilen. Var det är för fel syns sist i
loggfilen TA7DTD.log
x är antal sekunder (1- 86400) mellan cykliska läsningar och <Adress> är den tekniska adressen för den punkt du vill läsa, se vidare under Channel.
Har kan du ange ett antal tekniska adresser dit data skall skrivas med syntax enligt READ ovan samt dessutom kan DUCxHELG anges för att sätta helg i en duc. Du kan fritt skicka värden mellan analoga, digitala och heltals punkter. Programmet gör vad det kan för att tolka det hela på ett logisk sätt.
y är antal sekunder (1- 86400) mellan cykliska skrivningar till 'nästa punkt'. Dvs om du har 10 punkter att skriva till och sätter y till 60 så tar det tio minuter mellan skrivning till en enskild punkt.
h är hysteresen för att aktivera en snabbare skrivning. Om h är större än 0, och insignalen ändras mer än detta värde mellan två läsningar, så aktiveras skrivintervallet z istället för y.
Man kan skriva adresserna på flera rader om man vill.